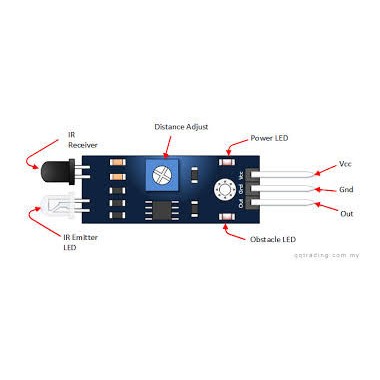
Description
Infrared obstacle avoidance sensor is designed for the design of a wheeled robot obstacle avoidance sensor distance adjustable. This ambient light sensor adaptable, high precision, having a pair of infrared transmitter and receiver, transmitter tubes emit a certain frequency of infrared,When detecting the direction of an obstacle (reflector), the infrared receiver tube receiver is reflected back, when the indicator is lit,Through the circuit, the signal output interface output digital signal that can be detected by means of potentiometer knob to adjust the distance, the effective distance from 2 ~ 40mm, working voltage of 3.3V-5V, operating voltage range as broad, relatively large fluctuations in the power supply voltage of the situation stable condition and still work for a variety of microcontrollers,Arduino controller, BS2 controller,attached to the robot that can sense changes in their surroundings.
Specifications:
1. Working voltage: DC 3.3V-5V
2. Working current: ≥ 20mA
3. Operating temperature: -10℃~+50℃
4. detection distance :2-40mm
5.IO Interface: 4-wire interfaces (-/+/S/EN)
6. Output signal: TTL level (low level there is an obstacle, no obstacle high
تشکر نظر شما نمی تواند ارسال شود
گزارش کردن نظر
گزارش ارسال شد
گزارش شما نمی تواند ارسال شود
بررسی خود را بنویسید
نظر ارسال شد
نظر شما نمی تواند ارسال شود